Допустим, вы двигаетесь на велосипеде, и вдруг кто-то толкает вас сбоку. Чтобы быстро восстановить равновесие и избежать падения, вы повернете руль велосипеда в направлении толчка. Велосипедисты делают это рефлекторно, но удивительно, что велосипед может выполнить это действие самостоятельно. Современные велосипеды могут самостоятельно удерживать равновесие даже при движении без управления. Посмотрим, как этот эффект можно смоделировать в COMSOL Multiphysics.
Что мы знаем о самобалансировании велосипедов
Современный велосипед не очень сильно отличается от безопасного велосипеда — одной из первых конструкций, появившейся в 80-х годах XIX века. По прошествии более ста лет ученые все еще пытаются выяснить, за счет каких эффектов велосипед становится самобалансируемым. Другими словами, как неуправлемый велосипед сохраняет равновесие в вертикальном положении? Описанию движения велосипеда с помощью аналитических уравнений посвящено множество опубликованных работ. Одной из первых важных публикаций по этой теме была статья Фрэнсиса Уиппла, в которой он получил общие нелинейные уравнения динамики велосипеда, управляемого велосипедистом без использования рук.
Принято считать, что устойчивость велосипеда обеспечивается двумя факторами — гироскопической прецессией переднего колеса и стабилизирующим действием продольного наклона оси поворота колеса. Совсем недавно команда исследователей из Делфта и Корнелла (см. ) опубликовала всеобъемлющий обзор линеаризованных уравнений движения для модели велосипеда Уиппла. Они использовали свои результаты для демонстрации самобалансирующегося велосипеда. Их исследование показывает, что этому явлению нельзя дать простое объяснение. Сочетание факторов, в том числе гироскопического и стабилизирующего эффектов, геометрии велосипеда, скорости и распределения массы позволяет неуправляемому велосипеду сохранять вертикальное положение.
Вдохновившись этой работой, мы построили динамическую модель многотельной системы, чтобы продемонстрировать самобалансирующееся движение велосипеда, управляемого велосипедистом без помощи рук.
Положение велосипеда в разные моменты времени.
Многотельная модель велосипеда
Чтобы обеспечить чистое качение колес и ограничить их проскальзывание в трех направлениях, нам нужны три граничных условия.
Модель колеса с отображением направлений, в которых ограничены перемещения.
Используются следующие ограничения: Отсутствие проскальзывания в прямом направлении:
{\frac{d\bold{u}}{dt}.\bold{e}_{2}=r\frac{d\bold{\theta}_s}{dt}}
Отсутствие проскальзывания в поперечном направлении:
\frac{d\bold{u}}{dt}.\bold{e}_{3}=r\frac{d\bold{\theta}_{l}}{dt}
Отсутствие проскальзывания перпендикулярно поверхности контакта с землей:
\frac{d\bold{u}}{dt}.\bold{e}_{4}=0
где \bold{e}_{2} , \bold{e}_{3} , and \bold{e}_{4} — мгновенное направление (наклонная ось), поперечное направление (ось вращения) и нормаль к поверхности контакта (\bold{e}_{4}=\bold{e}_{2} \times\bold{e}_{3}) , соответственно;
\frac{d\bold{u}}{dt} — поступательная скорость движения; r — радиус колеса; \frac{d\bold{\theta}_{s}}{dt} — угловая скорость вращения; \frac{d\bold{\theta}_{l}}{dt} — угловая наклонная скорость.
Поскольку применить указанные граничные условия к скорости невозможно, они дискретизируются во времени и накладываются следующим образом:
(\bold{u}-\bold{u}_{p}).\bold{e}_{2}=r(\bold{\theta}_{s}-\bold{\theta}_{sp})
(\bold{u}-\bold{u}_{p}).\bold{e}_{3}=r(\bold{\theta}_{l}-\bold{\theta}_{lp})
(\bold{u}-\bold{u}_{p}).\bold{e}_{4}=0
где \bold{u}_{p} , \bold{\theta}_{sp} и\bold{\theta}_{lp} — это вектор смещения, угол вращения и наклона в предыдущий момент времени, соответственно.
В дискретных граничных условиях, обеспечивающих отсутствие проскальзывания, используется результат расчета положения колеса на предыдущем шаге по времени. Положение жесткого тела, вращение и мгновенные положения осей на предыдущем шаге по времени сохраняются с помощью глобальных уравнений и узла Previous Solution в нестационарном решателе.
Моделирование движения самобалансирующегося велосипеда
Для анализа мы выбрали велосипед, угол наклона руля которого составляет 18°. Начальное значение скорости велосипеда составляет 4.6 м/с. Через 1 секунду после начала движения на велосипед в течение очень короткого периода времени воздействует сила 500 Н. Под действием силы велосипед отклоняется от прямолинейной траектории движения в заданном направлении.
В течении первой секунды велосипед движется вперед вдоль первоначально заданного направления с постоянной скоростью. Затем боковое усилие вызывает отклонение. Отметим, что велосипедист не держит руки на руле и не может управлять балансом велосипеда. Что происходит дальше? Мы можем заметить, что как только велосипед начинает наклоняться, руль поворачивается в направлении падения. Корректировка положения руля при падении приводит к восстановлению равновесия велосипеда.
Велосипед продолжает двигаться вперед, и в процессе движения начинает наклоняться в обратную сторону. Этот наклон меньше по величине, а движение руля точно следует за наклоном с небольшим отставанием. Такое колебание вправо-влево продолжается и в конечном итоге затухает. Велосипед движется вперед в строго вертикальном положении и слегка увеличивает скорость. Колебания руля, углы поворота и угловая скорость постепенно снижаются и затухают.
Движение велосипеда на ровной поверхности при отклонении от прямолинейного движения. Стрелка показывает наклон велосипеда.


Результаты расчета углов наклона и поворота руля (слева) и относительная угловая скорость (справа) велосипеда.
Проведение анализа устойчивости
Таким образом, мы узнали, что велосипед может самобалансироваться. Исследование показало, что невозможно выделить какой-то один параметр, определяющий устойчивость велосипеда. Конструкция велосипеда, распределение массы и скорость движения — все эти факторы влияют на устойчивость. Чтобы лучше понять это явление, мы провели дополнительный анализ для изучения влияния двух параметров — начальной скорости и наклона рулевой оси. Мы использовали описанную выше модель велосипеда с углом наклона оси руля 18° и начальной скоростью 4.6 м/с в качестве исходной конфигурации и провели параметрический анализ влияния этих двух факторов.
Различные значения начальной скорости
Велосипед не может оставаться в строго вертикальном положении, когда стоит на месте. Мы изменяли скорость движения от 2.6 м/с до 6.6 м/с с шагом 1 м/с, чтобы оценить влияние этого параметра. В диапазоне 2.6–3.6 м/с велосипед наклоняется слишком сильно и неустойчив. На скорости 5.6 м/с скорость наклона стремится к нулю, но сам угол наклона приобретает ненулевое значение. Хотя данная конфигурация устойчива, велосипед будет двигаться по кругу с небольшим наклоном. На 6.6 м/с наклон и угол поворота руля увеличиваются со временем, делая движение неустойчивым.
| Неустойчивое | Устойчивое | Неустойчивое | ||
|---|---|---|---|---|
| 2.6 м/с | 3.6 м/с | 4.6 м/с | 5.6 м/с | 6.6 м/с |


Устойчивый случай соответствует скорости 5.6 м/с (слева), а неустойчивый — скорости 6.6 м/с (справа).
Угол поворота руля
Узел рулевого управления очень важен для самобалансировки велосипеда. Если велосипедом невозможно управлять (например, если руль заклинило), то велосипед не сможет компенсировать наклон, поэтому он в итоге упадет. В этой связи, поворот оси руля, который контролирует уход вилки, также влияет на самобалансировку велосипеда.
Чтобы проанализировать влияние поворота оси руля на устойчивость велосипеда, мы изменяли углы поворота руля от 15° до 21° с шагом 1°. При угле в 15° наклон и угол поворота руля увеличиваются со временем, что делает данную конфигурацию неустойчивой. Велосипед устойчив в диапазоне от 16° до 19° и неустойчив для больших углов. При значениях поворота больше 19°, наклон и угол поворота колеблются, и эти осцилляции со временем возрастают, что приводит к потере устойчивости.
В этой публикации мы рассказали, как смоделировать движение неуправляемого самобалансирующегося велосипеда с помощью модуля Динамика многотельных систем (Multibody Dynamics) в COMSOL Multiphysics. Мы продемонстрировали, как реализовать ограничения на проскальзывание на жестком колесе через уравнения, а затем объединили эти ограничения с многотельной моделью велосипеда. Затем мы проанализировали влияние начальной скорости и поворота оси на устойчивость велосипеда. Оценив эти параметры, мы увидели, что велосипед может сохранять устойчивость в одной конфигурации и терять ее в другой.
Самобалансировка велосипеда является следствием целого ряда факторов. С помощью нашего анализа и в соответствии с предыдущими исследованиями мы продемонстрировали, что устойчивость велосипеда связана с его способностью "подруливать" в направлении наклона.
| Моделирование в электронных таблицах
Уроки 17 - 18
Моделирование в электронных таблицах
Моделирование движения тела под действием силы тяжести
Примеры движения под действием силы тяжести хорошо известны. Это и падение тела с некоторой высоты, и движение тела, брошенного вверх с некоторой скоростью, и движение тела, брошенного под углом к горизонту. Если в таких задачах не учитывать силу сопротивления воздуха, то все перечисленные виды движения описываются известными формулами. Но задачи, в которых сопротивление воздуха учитывается, не менее интересны.
ЗАДАЧА 3.24. Поражение цели
I этап. Постановка задачи
ОПИСАНИЕ ЗАДАЧИ
Мальчики играют в бадминтон. Порыв ветра подхватил волан и отнес его на ветви дерева. Предстоит нелегкая задача - достать волан. Задачу можно решить несколькими способами. Каждый из способов имеет свои плюсы и минусы.
Можно, например, залезть на дерево. Но это очень опасное занятие: ветки дерева чем выше, тем тоньше. Велика вероятность падения. Можно спилить дерево. Но, видимо, еще никто не опробовал такой путь решения задачи. Если бы все выбирали такой способ решения задачи, то давно бы уже не осталось ни одного дерева. Можно ждать, когда волан упадет сам, подхваченный очередным порывом ветра. Наиболее часто волан пытаются сбить камнем. Выберем эту модель поведения и мы. Тем более, что нам известны законы движения тела.
ЦЕЛЬ МОДЕЛИРОВАНИЯ
Исследовать движение тела, брошенного под углом к горизонту. Подобрать начальные значения скорости и угла бросания так, чтобы брошенное тело попало в цель.
ФОРМАЛИЗАЦИЯ ЗАДАЧИ
Примечание. Чтобы задать точность попадания △ , надо учитывать размеры тела.
Точность попадания △ должна быть не более половины наименьшего геометрического размера тела.
Так, например, если цель - волан размером в диаметре примерно 7 см, то △
= 3,5 см. Если цель - баскетбольное кольцо диаметром 40 см, то △
= 20 см. Если цель - аэростат высотой 5 м, то △
= 2,5 м.
II этап. Разработка модели
ИНФОРМАЦИОННАЯ МОДЕЛЬ
Характеристики объектов и процесса представим в виде таблицы.

Параметры движения тела представлены на рисунке 3.4. Движение тела, брошенного под углом к горизонту, описывается формулами


КОМПЬЮТЕРНАЯ МОДЕЛЬ
Для моделирования выберем среду табличного процессора. В этой среде табличная информационная и математическая модели объединяются в таблицу, которая содержит три области:
♦ исходные данные;
♦ промежуточные расчеты;
♦ результаты.
1. Заполните область исходных данных по образцу.

Столбцы А, В, С, D, Е, F заполнить сверху вниз аналогичными формулами.
2. Заполните область промежуточных рассчетов и результатов.

ПЛАН ЭКСПЕРИМЕНТА
ТЕСТИРОВАНИЕ
ЭКСПЕРИМЕНТ 1
Исследовать движение тела.
ЭКСПЕРИМЕНТ 2
Исследовать изменение движения тела при изменении начальной скорости.
ЭКСПЕРИМЕНТ 3
Исследовать изменение движения тела при изменении угла бросания.
ЭКСПЕРИМЕНТ 4
Изменяя начальную скорость и угол бросания, исследовать характер движения тела и его положение по отношению к цели.
ЭКСПЕРИМЕНТ 5
Изменяя исходную начальную скорость и угол, подобрать значения так, чтобы брошенное тело попало в цель с заданной точностью.
ПРОВЕДЕНИЕ ИССЛЕДОВАНИЯ
ТЕСТИРОВАНИЕ
1. Заполните столько строк расчетной таблицы, пока координата у не станет меньше нуля.
2. Сравните результаты тестового расчета с результатами, приведенными в примере расчета. Ниже в таблице представлено несколько строк с результатами расчетов по приведенным исходным данным.

3. По столбцам В и С построить диаграмму движения. Пример представлен на рисунке 3.6. Для построения диаграммы возьмите столько расчетных значений, чтобы кривая пересекла горизонтальную ось х .
4. Как определить, сколько расчетных точек надо взять для построения диаграммы?
Вывод.
Для построения диаграммы надо взять расчетные значения, у которых координата
y
больше 0, и одно отрицательное значение.
ЭКСПЕРИМЕНТ 1. Исследование движения тела
1. По диаграмме тестового примера опишите, как движется тело.
2. Объясните, как по диаграмме определить точку наивысшего подъема тела.

3. Объясните, что на диаграмме обозначает точка пересечения кривой с горизонтальной осью х. Как по таблице расчетов определить эту точку?
4. Определите по диаграмме, на каком расстоянии от точки броска тело упадет на землю.
5. Определите по таблице расчетов:
Наибольшую высоту подъема;
время движения до наивысшей точки;
расстояние от точки броска до точки падения на землю;
время движения до падения.
В свободной области электронной таблицы запишите результаты исследования движения тела по предложенному образцу.

6. Введите другой вариант исходных данных, заполните для них таблицу результатов эксперимента.
ЭКСПЕРИМЕНТ 2. Зависимость движения тела от начальной скорости (угол бросания неизменный)
1. Изменяя начальную скорость от 5 до 20 м/с, проследите, как изменяется наибольшая высота подъема (координата у)
2. Проследите, как изменяется дальность полета (координата x) при увеличении начальной скорости.
3. Проведите расчеты для некоторого угла и результаты исследований сведите в таблицу (таблица 2), составленную на свободном поле электронной таблицы.
4. Запишите в таблицу выводы по результатам эксперимента: как изменяется высота и дальность полета при изменении начальной скорости (при неизменном угле бросания)?

ЭКСПЕРИМЕНТ 3. Зависимость движения тела от угла бросания (начальная скорость движения неизменна)
1. Проведите расчеты по модели, увеличивая угол бросания от 5° до 85° и оставляя неизменной начальную скорость (например, 15 м/с).
2. Проследите изменение высоты подъема (координата у) при увеличении угла бросания, начальная скорость неизменна.
3. Проследите изменение дальности полета (координата x) при увеличении угла бросания.
4. Результаты расчетов сведите в таблицу на свободном поле электронной таблицы (таблица 3).

5. Запишите в таблицу выводы по результатам эксперимента: как изменяется высота и дальность полета при изменении угла бросания (при неизменной начальной скорости)?
ЭКСПЕРИМЕНТ 4. Исследование характера движения тела и его положения по отношению к цели

На рисунке 3.7 показаны варианты расположения кривой движения тела по отношению к цели. Их можно охарактеризовать следующим образом:
1. Тело при движении не достигает высоты, на которой расположена цель, и падает на землю, не достигая X ц .
2. Тело при движении не достигает высоты, на которой расположена цель, но падает на землю дальше X ц .
3. Тело при движении поднимается выше Y ц , но падает на землю, не достигая X ц .
4. Тело при движении поднимается выше Y ц и падает на землю дальше X ц .
В столбцах D, Е и F вычисляются величины S x , S y , S, которые показывают расположение тела по отношению к цели.
1. Исследуйте, что означает знак S x и S y в различные моменты времени.
Вывод.

2. Исследуйте, как изменяется S при движении тела.
Вывод. Полное расстояние до цели сначала уменьшается, а потом увеличивается.
3. Подберите исходные данные (начальную скорость и угол бросания), соответствующие вариантам движения тела, представленным на рисунке 3.7, на свободном поле электронной таблицы (таблица 4).

ЭКСПЕРИМЕНТ 5. Подбор исходных значений для попадания в цель
Прежде всего заметим, что существует бесконечное множество вариантов исходных данных для попадания в цель. Наша задача - подобрать один вариант.
1. По столбцу F определите наименьшее значение S . В этот момент тело ближе всего пролетает к цели.
2. Постройте столбец G анализа попадания. Будем считать, что тело попало в цель, если расстояние до цели стало меньше заданной точности (ячейка $D$10) . Для этого в ячейку G16 введите формулу =ЕСЛИ(F16<$D$10; «попал»; «мимо») .
3. Изменяйте исходные данные, чтобы получить наилучшее приближение к цели.
4. Результаты исследования запишите на свободном поле электронной таблицы (таблица 5).

5. Подберите еще один набор исходных данных, при котором тело попадет в цель «навесом», то есть после прохода наивысшей точки подъема.
6. Измените координаты цели и подберите значения начальной скорости и угла бросания для нового положения цели.
Результаты и выводы, полученные в экспериментах, оформите в виде отчета в текстовом документе. В отчете приведите ответы на следующие вопросы:
1. Как движется тело, брошенное под углом к горизонту?
2. Как определить наивысшую точку подъема?
3. Как определить дальность полета?
4. Как изменяется наибольшая высота подъема при увеличении начальной скорости и неизменном угле броска?
5. Как изменяется дальность полета при увеличении начальной скорости и неизменном угле броска?
6. Как изменяется наибольшая высота подъема при увеличении угла бросания и неизменной начальной скорости?
7. Как изменяется дальность полета при увеличении угла бросания и неизменной начальной скорости?
8. Как по расчетам определить положение тела по отношению к цели в каждый момент времени? Как это определить по таблице расчетов?
9. Как изменяется расстояние от тела до цели при движении и как это определить по таблице расчетов?
ЗАДАЧА 3.25*. Движение парашютиста
* Задача повышеной сложности
I этап. Постановка задачи
ОПИСАНИЕ ЗАДАЧИ
Парашютист при падении к земле испытывает действие силы тяжести и силы сопротивления воздуха. Экспериментально установлено, что сила сопротивления зависит от скорости движения: чем больше скорость, тем больше сила. При движении в воздухе эта сила пропорциональна квадрату скорости с некоторым коэффициентом сопротивления k , который зависит от конструкции парашюта и веса человека R сопр = kV 2 .Каково должно быть значение этого коэффициента, чтобы парашютист приземлился на землю со скоростью не более 8 м/с , не представляющей опасности для здоровья?
Определите цели моделирования и проведите формализацию задачи.
II этап. Разработка модели
ИНФОРМАЦИОННАЯ МОДЕЛЬ
Составьте информационную модель самостоятельно.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ

На рисунке 3.8 указаны силы, действующие на парашютиста. Согласно второму закону Ньютона движение под действием сил можно записать равенством. Проецируем это равенство на ось движения, подставим выражение для силы сопротивления воздуха mа = mg - kV 2 .
Получим формулу для вычисления ускорения

Будем рассчитывать скорость и расстояние, которое пролетел парашютист через равные промежутки времени △t . Формула для вычисления моментов времени имеет вид: t i+1 + t i + △t .

где V i - скорость в начале промежутка (V o - начальная скорость). Скорость в конце промежутка (и, соответственно, в начале следующего) вычисляется по формуле равноускоренного движения
Расстояние, которое пролетел парашютист, равно сумме расстояния, пройденного к началу очередного промежутка времени (S i ), и расстояния, пройденного на этом промежутке:

КОМПЬЮТЕРНАЯ МОДЕЛЬ
Для моделирования выберем среду электронной таблицы. В этой среде информационная и математическая модели объединяются в таблицу, которая содержит три области:
♦ исходные данные;
♦ промежуточные расчеты;
♦ результаты.
1. Заполните область исходных данных.
2. Заполните расчетные столбцы А, В, С, D, в которых вычисляются параметры движения парашютиста:
Время;
скорость;
расстояние;
ускорение.
3. Введите формулы в расчетные ячейки. Пример заполнения расчетной таблицы:

III этап. Компьютерный эксперимент

ПЛАН ЭКСПЕРИМЕНТА
ТЕСТИРОВАНИЕ
Провести тестовый расчет компьютерной модели по данным, приведенным в таблице.
ЭКСПЕРИМЕНТ 1
Исследовать движение тела под действием силы тяжести и сопротивления воздуха.
ЭКСПЕРИМЕНТ 2
Подобрать значение коэффициента сопротивления k для безопасного приземления парашютиста.
ЭКСПЕРИМЕНТ 3
Исследовать зависимость скорости, ускорения от начальной скорости движения.
ЭКСПЕРИМЕНТ 4
Исследовать, как изменяется расстояние полета до стабилизации скорости падения.
ПРОВЕДЕНИЕ ИССЛЕДОВАНИЯ
ТЕСТИРОВАНИЕ
1. Сравните результаты тестового расчета с результатами, приведенными в примере расчета. Пример тестового расчета:

2. Постройте диаграмму изменения скорости, ускорения и расстояния в зависимости от времени.

ЭКСПЕРИМЕНТ 1. Исследование движения тела с учетом сопротивления воздуха
1. Определите по диаграмме и по таблице, как изменяется с течением времени скорость движения парашютиста. Через сколько секунд наступает стабилизация скорости падения?
2. Определите по диаграмме и по таблице, как изменяется с течением времени ускорение парашютиста.
3. Определите по диаграмме и по таблице, какое расстояние пролетит парашютист до стабилизации скорости движения. Результаты поместите на свободном поле в электронной таблице.
4. Измените шаг времени (0,1 с) и определите скорость стабилизации движения, расстояние полета до стабилизации. Результаты исследования приведите в таблице.
ЭКСПЕРИМЕНТ 2. Подбор коэффициента сопротивления
Изменяя значение коэффициента k (ячейка СЗ) , подберите скорость стабилизации движения, безопасную для приземления тренированного человека (8 м/с) .
ЭКСПЕРИМЕНТ 3. Исследование стабилизации скорости и расстояния в зависимости от начальной скорости
Парашютист, выпрыгнув из самолета, некоторое время летит в свободном падении, набирает достаточно большую скорость движения и только потом раскрывает парашют.
1. Измените значение начальной скорости (10 м/с) .
2. По таблице расчетов определите, как изменится:
Начальное ускорение;
скорость стабилизации;
расстояние полета до стабилизации скорости.
3. Результаты эксперимента запишите на свободном поле электронной таблицы. Сделайте вывод.
Результаты эксперимента 3:
Примечание.
Обратите внимание, как изменяется начальное ускорение. Учтите, что оно не может быть большим, так как ускорение более 3g (30 м/с2)
вызывает очень большие перегрузки.
IV этап. Анализ результатов моделирования
По результатам компьютерного эксперимента ответить на следующие вопросы:
1. Как изменяется скорость парашютиста с течением времени?
2. Как изменяется скорость парашютиста при изменении коэффициента сопротивления?
3. Каким должен быть коэффициент сопротивления, чтобы парашютист опустился на землю со скоростью 8 м/с?
4. Как изменяется скорость движения и как зависит установившаяся скорость равномерного движения парашютиста от начальной скорости?
5. Через сколько секунд после начала движения скорость парашютиста можно считать установившейся?
6. На какой высоте от земли парашютист должен раскрыть парашют, чтобы приземлиться с заданной скоростью.
ЗАДАНИЯ ДЛЯ САМОСТОЯТЕЛЬНОЙ РАБОТЫ
3.26. Баскетболист.
Пользуясь построенной моделью движения тела, брошенного под углом, рассчитать, с какой начальной скоростью и под каким углом нужно бросить баскетбольный мяч, чтобы попасть в кольцо.
При расчетах учесть следующие условия:
Начальная скорость мяча при броске может изменяться в пределах до 15 м/с;
координаты кольца у
= 3 м, х
= 0,5 ÷ 7 м;
точность попадания связана с диаметром кольца и равна △
= 20 см;
мяч должен попасть в кольцо «навесом», то есть после прохода наивысшей точки подъема.
Измените математическую и компьютерную модели движения тела, брошенного под углом, так, чтобы по ним можно было рассчитать движение тела, брошенного с некоторой начальной высоты
y
0
3.27. Спасение утопающего.
С какой скоростью и под каким углом надо бросить с борта спасательного судна круг утопающему? При расчетах учесть следующие условия:
расстояние утопающего от корабля;
точность попадания равна △
= 0,5 м;
угол бросания может быть отрицательным;
высоту борта корабля над уровнем моря.
3.28. Акробаты.
Многие видели в цирке такой акробатический номер. Один акробат встает на прыжковую доску с одной стороны, второй прыгает на другой конец. С какой начальной скоростью и под каким углом должен взлететь вверх первый акробат, чтобы опуститься точно на плечи третьего участника номера? При расчетах учесть следующие условия:
Начальная скорость может изменяться в пределах до 10 м/с;
высоту и удаление третьего акробата;
точность попадания равна △
= 0,1 м.
Цели урока:
Обучающие (конечные результаты урока):
Знание: знать, что представляют собой процесс движения, как его организовать в Qbasic.
Понимание: уметь привести примеры движения, которые можно смоделировать на ЭВМ.
Применение: уметь составить программу, реализующую движение по заданной траектории, проверить ее на ЭВМ.
Анализ: уметь определить результаты работы строк из программы, выявить ошибки.
Синтез: уметь создать моделирующую программу с использованием движения.
Сравнительная оценка: сравнить между собой программы с использованием движения в графическом и текстовом режимах.
Развивающие: развитие общеучебных умений и навыков, воображения и фантазии.
Воспитательные: воспитание ученика самостоятельной, организованной личностью.
Оборудование:
компьютерный класс, язык программирования Qbasic, презентация по теме урока, проектор к ЭВМ, экран, карты урока, карточки с правильными ответами для самоконтроля, демонстрационные программы.
Ход урока:
Наш урок посвящен практическому применению операторов организации циклов. С их помощью мы научимся моделировать на компьютере процесс движения различных объектов.
Моделирование - это форма отражения действительности, а так как мы будем описывать движение на языке программирования, то полученные модели называют информационными.
Говоря о движении, сразу вспоминается крылатое выражение «Движение – это жизнь». И действительно, кто не хотел, чтобы неподвижная картинка на экране «ожила». Например, на ней пошел бы «настоящий» снег, неподвижный кораблик поплыл, а стрелки часов начали бы свой ход. Этому «волшебству» мы можем научиться сегодня на уроке.
Итак, вы узнаете,
Как смоделировать процесс движения по прямой;
Рассмотрите примеры программ;
Научитесь «оживлять» объекты;
Проанализируете готовые программы;
Сравните процесс движения в графическом и текстовом режимах.
Что такое движение? С физической точки зрения движение – это изменение положения тела с течением времени. Для начала мы будем моделировать движение простых объектов– точки, окружности, линий. Вспомним их форматы записи.
У каждого объекта выбирается точка с координатой (x,y), положение которой будет меняться. Если для окружности – это координата центра, то у линии (прямоугольника) - это только одна из точек.
Если мы хотим перемещать символы по экрану, то нам потребуются операторы: LOCATE для выбора положения символа и PRINT для его печати.
Каковы правила моделирования движения?
1) Выберем координаты.
2) Изобразим объект.
3) Сделаем паузу.
4) Сотрем объект (закрашивая его цветом фона, или на месте удаляемых символов будем печатать пробелы).
5) Выберем следующие координаты.
Хотелось бы обратиться к еще одному высказыванию О. Холмз: «В нашей жизни важно не столько положение, в котором мы находимся, сколько направление, в котором мы движемся». Помимо глубокого философского смысла, оно имеет самое прямое отношение к моделированию движения.
Для перемещения очень важно, по какой траектории будет двигаться объект: по прямой (в горизонтальном или вертикальном направлениям), или графикам различных функций. Сегодня мы уделим внимание только движению по прямой (в горизонтальном и вертикальном направлении).
Тренинг 1. Движение по горизонтали.
Определите по приведенным траекториям следующие данные и занесите в таблицу:
|
номер графика |
координата X меняется |
координата Y |
||
Тренинг 2. Движение по вертикали.
Определите по приведенным траекториям следующие данные и занесите в таблицу:
|
номер графика |
координата X |
координата Y меняется |
||
Составьте программу, моделирующую движение точки по траектории графика №_____.
Тренинг 3.
Определите по приведенным строкам программы направление, в котором движется объект (вверх, вниз, вправо или влево по экрану), обозначьте направление стрелками:
1) FOR Y= 5 TO 100 STEP 10 _____________________________
2) FOR X= 1 TO 400 STEP 1 _____________________________
3) FOR X= 300 TO 40 STEP -10 _____________________________
4) FOR Y= 200 TO 10 STEP -10 _____________________________
5) FOR Y= 105 TO 3 STEP 10 _____________________________
6) FOR X= а TO a-100 STEP -10_____________________________
Тренинг 4.
Определите результат выполнения программы:
CLS
SCREEN 12
FOR Y= 5 TO 25 STEP 1
X=10
LOCATE Y,X
PRINT “ *”
SLEEP 1
LOCATE Y,X
PRINT “ ”
NEXT Y
FOR Х= 10 TO 60 STEP 1
Y= 25
LOCATE Y,X
PRINT “ *”
SLEEP 1
LOCATE Y,X
PRINT “ ”
NEXT Х
END
Упражнения
- В предложенной программе внести следующие изменения:
- чтобы точка двигалась по заданной траектории из тренинга 1;
- чтобы точка двигалась по заданной траектории из тренинга 2;
- чтобы двигалась не точка, а окружность (радиус = 30);
- чтобы окружность двигалась в обратном направлении;
- чтобы двигался закрашенный прямоугольник со сторонами 50 и 30.
Подсказка. Форматы записи:
окружность CIRCLE (X, Y), R, C
закрашенный прямоугольник LINE (X,Y) – (X1,Y1), C, BF
Составить программу для моделирования движения символов по экрану, составляющих любое из предложенных слов:
Домашнее задание:
1) Смоделируйте на компьютере сюжет русской народной сказки «Колобок». Изобразите дорогу-лабиринт и колобка, который ее успешно преодолевает.
2) Действие одного из компьютерных вирусов на экране проявлялось тем, что напечатанные символы «ссыпались» вниз. Составьте программу, которая моделировала бы данный процесс.
3) Видоизмените программу, так, чтобы пользователь печатал слово в произвольном месте экрана, но его «постигала бы та же участь».
Подведение итогов урока.
Ответьте на вопросы:
1) Как организуется движение по горизонтальной траектории?
2) Как смоделировать движение по вертикали?
3) В чем отличие моделирования движения графических объектов и текстовых символов?
4) Какие процессы можно смоделировать, пользуясь полученными на уроке знаниями?
Моделирование движения заключается в искусственном воспроизведении процесса движения физическими или математическими методами, например, с помощью ЭВМ.
В качестве примеров физических методов моделирования могут быть названы исследования движения на различных макетах элементов дороги или полигонные испытания, где создаются искусственные условия, имитирующие реальное движение транспортных средств. Простейшим примером физического моделирования может служить распространенный метод проверки возможностей маневрирования и постановки на стоянку различных транспортных средств с помощью их моделей на заданной площади, изображенной в уменьшенном масштабе.
Наибольшее значение имеет математическое моделирование (вычислительный эксперимент), основывающееся на математическом описании транспортных потоков. Благодаря быстродействию ЭВМ, на которых осуществляется такое моделирование, удается в минимальное время провести исследование влияния многочисленных факторов на изменения различных параметров и их сочетания и получить данные для оптимизации управления движением (например, для регулирования на пересечении), которые невозможно обеспечить натурными исследованиями.
В основу вычислительного эксперимента с применением ЭВМ легло понятие модели объекта, то есть математическое описание, соответствующее данной конкретной системе и отражающее с требуемой точностью поведение ее в реальных условиях. Вычислительный эксперимент дешевле, проще натурного, легко управляем. Он открывает путь к решению больших комплексных проблем и оптимальному расчету транспортных систем, научно обоснованному планированию исследований. Недостаток вычислительного эксперимента состоит в том, что применимость его результатов ограничена рамками принятой математической модели, построенной на основе закономерностей, выявленных с помощью натурного эксперимента.
Изучение результатов натурного эксперимента позволяет получить функциональные соотношения и теоретические распределения, исходя из которых строится математическая модель. Математическое моделирование в вычислительном эксперименте целесообразно разделить на аналитическое и имитационное. Процессы функционирования систем при аналитическом моделировании описываются с помощью некоторых функциональных отношений или логических условий. Учитывая сложность процесса дорожного движения, для упрощения приходится прибегать к серьезным ограничениям. Однако, несмотря на это, аналитическая модель позволяет находить приближенное решение задачи. При невозможности получения решения аналитическим путем модель может исследоваться с применением численных методов, позволяющих находить результаты при конкретных начальных данных. В этом случае целесообразно использовать имитационное моделирование, подразумевающее применение ЭВМ и алгоритмическое описание процесса вместо аналитического.
Широкое применение имитационное моделирование может найти для оценки качества организации движения, а также при решении различных задач, связанных с проектированием автоматизированных систем управления дорожным движением, например, при решении вопроса об оптимальной структуре системы. К числу недостатков имитационного моделирования относят частный характер получаемых решений, а также большие затраты машинного времени для получения статически достоверного решения.
Следует отметить, что в настоящее время область моделирования транспортных потоков находится в стадии формирования. Различные аспекты моделирования исследуются в МАДИ, ВНИИБД, НИИАТ и других организациях.
В транспортном потоке каждый автомобиль движется либо под влиянием со стороны других участников движения, либо в отсутствии их влияния. Движение автомобиля будем называть свободным, если ни один из участников дорожного движения не оказывает влияния на движение этого автомобиля, а также на мнение водителя о дорожно-транспортной обстановке, в результате изменения которого он мог бы изменить режим движения своего автомобиля. Скорость движения такого автомобиля будем называть скоростью свободного движения на данном участке дороги.
Основанием для моделирования свободного движения автомобиля явились:
Уравнения теории эксплуатационных свойств автомобиля:
а) тягово-скоростные и тормозные свойства автомобиля;
б) уравнения криволинейного движения и устойчивости автомобиля.
Натурные наблюдения за параметрами движения автомобилей на двухполосных дорогах.
Математическая модель свободного движения автомобиля имеет следующую концептуальную основу:
Мера воздействия на органы управления автомобиля, а также мнение водителя о ДТС могут измениться только при наступлении одного из ситуаций, перечисленных ниже.
На каждом участке дороги водитель стремится поддерживать оптимальную с его точки зрения (базовую) скорость движения, которая зависит от цели и дальности поездки, вида перевозимого груза (количества пассажиров), состояния здоровья и степени утомления водителя и других факторов. Базовая скорость в модели задается случайным законом распределения, полученным в результате натурных наблюдений.
Если базовая скорость движения автомобиля на следующем участке дороги отличается от базовой скорости на текущем участке, то водитель заранее изменяет скорость движения автомобиля таким образом, чтобы к моменту въезда на новый участок скорость движения достигла величины базовой скорости на новом участке.
Водитель может через органы управления автомобиля воздействовать на параметры движения следующими способами:
а) изменить скорость движения и ускорение нажатием на педаль тормоза или акселератора (выдвижением рейки);
б) изменить передаточное число КПП, что позволяет изменить диапазон значений скорости движения автомобиля;
в) изменить направление движения автомобиля, вращением рулевого колеса.
Кроме перечисленных действий водитель может включить стоп-сигналы (нажатием педали тормоза) или сигналы поворота, что может служить причиной изменения режима движения других автомобилей.
С точки зрения обеспечения базовой скорости движения автомобиля в конкретных дорожных условиях могут возникнуть следующие характерные обстоятельства:
возможность водителя увеличить скорость движения автомобиля до базовой скорости ограничена тягово-динамическими характеристиками автомобиля;
возможность водителя уменьшить скорость движения автомобиля в режиме торможения (экстренное торможение) ограничена коэффициентом сцепления шины с дорогой и/или тормозными характеристиками автомобиля;
возможность водителя изменить скорость движения автомобиля до базовой скорости не ограничено ни тягово-динамическими или тормозными характеристиками автомобиля, ни сцепными качествами поверхности дороги.
Рассмотрим подробнее, каким образом моделируется движение автомобиля в перечисленных выше случаях.
В первом случае движение автомобиля моделируется на основе известных в теории автомобиля дифференциальных уравнений, полученными на основе уравнения силового баланса автомобиля:
P т = P п + P к + P в + P и, (2.5)
где P т - тяговая сила при установившейся скорости автомобиля;
P п - сила сопротивления подъему;
P к - сила сопротивления качению;
P в - сила сопротивления воздуху;
P и - сила сопротивления разгону (приведенная сила инерции).
Существуют различные зависимости, аппроксимирующие внешние характеристики двигателя. В рассматриваемой модели дифференциальные уравнения движения автомобиля получены на основе аппроксимации внешней характеристики двигателя, приведенной в работе :

где N e , N max - соответственно, мощность и максимальная мощность двигателя, квт;
M k - крутящий момент двигателя, Нм;
M kN - крутящий момент двигателя, при максимальной мощности, Нм;
a, b, c - постоянные коэффициенты для данного двигателя;
n - угловая скорость коленчатого вала двигателя, об/мин;
n N - угловая скорость коленчатого вала при максимальной мощности двигателя, об/мин.
После замены всех членов уравнения (2.5) на соответствующие значения и некоторых преобразований получается:
Где m a - масса автомобиля, кг;
m 0 - масса автомобиля, с номинальной нагрузкой, кг;
u k i - передаточное число коробки передач;
v - скорость движения автомобиля, м/с;
тр - коэффициент полезного действия трансмиссии;
k p - коэффициент коррекции двигателя;
Номинальная скорость движения автомобиля при i-й передаче, м/c;
G a - сила тяжести, действующий на автомобиль, Н;
k f - параметр учета влияния скорости движения на коэффициент сопротивления качению колеса;
W - фактор обтекаемости автомобиля, кг/м;
f 0 - коэффициент сопротивления качению при малой скорости движения;
б - продольный уклон дороги.
Уравнение (2.8) определяет ускорение автомобиля в зависимости от скорости движения. Для рассматриваемой имитационной модели зависимости вида “ускорение - скорость”, “путь разгона - скорость” и т. д. непригодны, поскольку при пересчете векторов-координат автомобилей через интервал времени t min (см. блок 12 на рис 2.16) возникает необходимость определения этих параметров в зависимости от времени.
С целью определения зависимости скорости движения от времени при полной подаче топлива можно проинтегрировать выражение (2.8). Пусть начальным условием будет v = v 0 при t=0. Тогда после интегрирования получим:
Проинтегрируем (2.13) еще раз, при начальных условиях t=0 и s=s 0 . Получим:
где v 0 - начальная скорость движения автомобиля;
s 0 - начальное положение автомобиля;
v 1 и v 2 - корни уравнения.
Для того чтобы получить зависимость a = a(t) нужно найти производную выражения (2. 13) по времени. Получим:
Выражения (2.13) - (2.15) позволяют пересчитать параметры движения автомобиля через произвольный промежуток времени t min , в условиях ограничения параметров движения тягово-динамическими характеристиками автомобиля.
Во втором случае моделирование движения автомобиля осуществляется при следующих допущениях:
силы реакции R x достигают максимального значения одновременно для всех колес;
коэффициенты сцепления x всех колес с дорогой, а следовательно, и ускорение автомобиля j з остаются неизменными за весь период установившегося замедления.
При таких допущениях процесс торможения может быть описан тормозной диаграммой j з = j(t) (рис. 2.3) . Весь процесс торможения с момента обнаружения опасности до полной остановки автомобиля состоит из следующих этапов:
время реакции водителя t рв;
время запаздывания t з;
время нарастания тормозного усилия t н;
время установившегося замедления t уст;
время растормаживания t р.
В случае торможения при полном использовании сил сцепления (экстренное торможение) j уст зависит только от коэффициента сцепления шин с дорогой и продольного уклона дороги, а значение ускорения можно считать постоянным:
Скорость движения и пройденный путь автомобиля в произвольный момент времени t легко определяются интегрированием выражений (2.16) и (2.17):
Рис. 2.3 Тормозная диаграмма автомобиля
И, наконец, в третьем случае водитель имеет возможность придавать автомобилю тот режим движения, который по его мнению является наиболее безопасным и целесообразным в сложившейся дорожно-транспортной ситуации. В этом случае значение ускорения находится в интервале
j уст < a < a max , (2. 20)
и определяется водителем.
С целью упрощения расчетов предполагается, что в таком режиме автомобиль движется равноускоренно до следующего особого состояния. Скорость движения и пройденный путь автомобиля через промежуток времени t в таком случае определяются следующим образом:
Теперь рассмотрим движение автомобиля в условиях изменения направления движения.
В модели предусмотрены следующие виды траекторий движения автомобилей:
прямолинейное движение;
круговое движение (угол поворота управляемых колес не изменяется);
криволинейное движение при постоянной угловой скорости поворота управляемых колес;
Маневрирование автомобилей (обгоны, перестраивания по полосам движения, повороты и т.д.) являются опасными, но в то же время неотъемлемыми элементами движения автомобилей. С изменением направления движения автомобилей связаны многочисленные конфликтные ситуации и ДТП, поскольку такие маневры, часто совершаемые внезапно для других участников дорожного движения, создают возмущения в транспортном потоке. Несмотря на это, в существующих имитационных моделях дорожного движения различных отечественных и зарубежных исследователей упрощенно описываются движение автомобиля и траектории отдельных его точек при изменении направления движения. Часто положение автомобиля на дороге задается только продольной координатой; при этом подразумевается, что в поперечном направлении автомобиль не движется, а изменение полосы движения при обгонах или маневрах перестроения происходит скачкообразно. В тех моделях, где учитывается поперечное движение, в лучшем случае движение автомобиля рассматривается как плоскопараллельное движение, при котором продольная ось автомобиля остается параллельной относительно продольной оси дороги. Такое упрощение оправдано при решении некоторых задач, таких, как определение скорости сообщения, определение пропускной способности участка дороги, при решении проблем экологии и т. д., потому что значительно упрощает модель и уменьшает объем расчетов. Однако при решении задач оценки уровня безопасности движения такое упрощение не оправдано.
Криволинейное движение автомобиля в рассматриваемой имитационной модели определяется:
координатами расчетной точки автомобиля относительно неподвижной системе координат;
курсовым углом движения автомобиля;
углом поворота управляемых колес автомобиля;
угловой скоростью поворота управляемых колес.
Расчетной точкой, относительно которого производятся все расчеты по определению координат автомобиля, в модели принята середина задней оси автомобиля. В таком случае уравнения, определяющие координаты имеют наименее громоздкий вид.
В модели движение автомобиля рассматривается как чередование прямолинейного движения, кругового движения и криволинейного движения переменного радиуса. Первые два достаточно хорошо описываются сравнительно простыми аналитическими выражениями. Рассмотрим подробней криволинейное движение (рис. 2.4). В дальнейшем будем принимать следующие допущения:
углы поворота обоих управляемых колес автомобиля равны между собой;
у колес автомобиля отсутствует боковой увод;
угловая скорость поворота управляемых колес постоянна;
расчетная точка автомобиля движется с постоянным ускорением;
автомобиль движется на плоскости (плоское движение);
отсутствует буксование колес;
крен автомобиля не влияет на траекторию.
Для оценки уровня безопасности движения первые два допущения мало значимы. Если в процессе движения значение угловой скорости поворота управляемых колес либо ускорение расчетной точки автомобиля существенно изменяется, то траектория автомобиля разбивается
на несколько участков, на каждом из которых значения указанных величин принимается постоянными.

Рис. 2.4
Таким образом, в пределах приемлемой точности вышеуказанные допущения значительно упрощают расчеты.
В работах приводятся уравнения, которые позволяют определить траекторию движения автомобиля. Так, в работе приведены следующие формулы, определяющие курсовой угол и координаты движения середины задней оси автомобиля:
где x в, y в - координаты середины задней оси автомобиля;
C 1 и C 2 - постоянные, определяемые начальными условиями;
Угол поворота управляемых колес автомобиля;
v o - скорость движения автомобиля;
k - угловая скорость поворота управляемых колес автомобиля;
L 0 - база автомобиля;
k p - режимный параметр, характеризующий режим криволинейного движения:
Аналогичные формулы, но относительно движения центра масс автомобиля приведены в работе:
где x ц.м. , y ц.м. - координаты центра масс автомобиля;
C 1 , C 2 , C 3 - постоянные, определяемые начальными условиями;
v a - скорость движения автомобиля;
v y - скорость бокового смещения центра масс автомобиля;
a - угловая скорость продольной оси автомобиля в горизонтальной плоскости.
Траектории точек автомобиля, находящихся на продольной оси, могут быть заданы зависимостью ее кривизны от времени. Однако, моделирование криволинейного движения автомобиля в неподвижной системе координат через x в, и y в, а также угла гораздо удобнее.
В уравнениях (2.23) - (2.26) скорость движения автомобиля предполагается постоянной величиной. В реальном процессе движения автомобиля в транспортном потоке часто сочетаются криволинейное движение с изменением скорости движения. Это происходит, в частности, в следующих ситуациях:
перед остановкой автомобиль одновременно уменьшает скорость движения и криволинейным движением приближается к правой кромке проезжей части;
после трогания с места автомобиль увеличивает скорость движения и по криволинейной траектории приближается к середине полосы движения;
во время обгона, особенно в первой фазе обгона с ожиданием, автомобиль меняет полосу движения и одновременно увеличивает скорость движения;
на перекрестках, после запрещающего сигнала светофора, или после пропуска помехи справа, поворачивающие автомобили двигаются криволинейно и с ускорением и т.д.
Сочетание криволинейного движения с изменением скорости движения является потенциальным источником конфликтных ситуаций, т.к. оно часто заставляет других участников движения изменить режим движения. Криволинейное движение автомобиля обязательно необходимо моделировать с учетом ускорения.
Уравнения, приведенные в разных исследованиях для определения траектории криволинейного движения, чаще всего выражают параметры движения автомобиля в виде дифференциальных уравнений или интегралов. Как правило, подынтегральные выражения имеют сложный аналитический вид и в явном виде не интегрируются. Поэтому, либо такие уравнения решаются численными, приближенными методами с применением компьютеров, либо траектория движения строится графическим или графоаналитическим методом. При решении многих конкретных задач эти методы оказываются целесообразными, особенно первый из них, при помощи которого можно рассчитать траекторию движения практически с любой точностью. Однако это достигается за счет больших затрат машинного времени счета. В течение имитационных экспериментов на задаваемом участке дороги одновременно могут находиться сотни автомобилей, каждый из которых совершает различные маневры, в том числе и криволинейное движение с ускорением. При использовании итерационных методов с целью расчета траектории движения большие затраты машинного времени неизбежны. Это резко замедляет работу имитационной модели в реальном масштабе времени. Поэтому здесь более целесообразным представляется разложение подынтегральных выражений в степенной ряд с требуемой точностью. Далее, после интегрирования полученных многочленов можно получить искомые параметры криволинейного движения в аналитическом виде.
Пусть автомобиль движется с постоянным ускорением a. Тогда выражение (2.23) принимает следующий вид:
Разложим в степенной ряд подынтегральное выражение, содержащееся в правой части (2.30) и возьмем столько членов, сколько требуется для обеспечения необходимой точности. Обозначим
Тогда (2.30) можно переписать в следующем виде:
Приближенные аналитические решения уравнений (2.24) и (2.25) также будем искать, разлагая в степенной ряд функции f()=cos(()) и g()=sin(()), где курсовой угол определяется из выражения (2.31). Производные от упомянутых функций первых нескольких порядков приведены в табл. 2.1.
Пусть в начале криволинейного движения курсовой угол автомобиля 0 =0. Тогда:
Теперь можно определить траекторию движения точки B автомобиля (рис. 2.4). Выражения (2.24) и (2.32) позволяют после интегрирования (2.24) получить
Аналогично, из выражений (2.25) и (2.33) после интегрирования (2.25) можно получить
Выражения (2.34) и (2.35) вполне приемлемы для расчета траектории движения автомобиля, если за время криволинейного движения курсовой угол автомобиля изменяется не более чем на 90°. В реальных дорожных условиях такое изменение практически никогда не превышает
Таблица 2.1
Производные от функций f(и) и g(и) первых нескольких порядков
|
Порядок производной n |
f(n)(и), при и=0 |
g(n)(и), при и=0 |
|
105 B4-588 B2-896 D2 |
420 B3-272 B+1120 B D2 |
|
|
2520 B3 D+8160 B D |
8064 B2 D-2240 D3+2176 D |
|
|
6300 B4-18960 B2+25200 B2 D2-31104 D2 |
945 B5+16380 B3-7936 B+57120 B D2 |
Таблица 2.2
Значения функций f(и) и g(и), описывающие процесс поворота автомобиля ГАЗ-24 при v 0 =10 м/с, k =0,05 рад/с, L 0 =2,8 м, 45°.
|
г(и), по формуле (2.23), град |
f(и), по формуле (2.23) |
f(и), по формуле (2.32) |
g(и), по формуле (2.23) |
g(и), по формуле (2.33) |
|
В табл. 2.2 приведены значения функций f() и g(), которые описывают процесс поворота автомобиля ГАЗ-24 при v 0 =10 м/с, k =0,05 рад/с, L 0 =2,8 м. Вычисления проводились с одной стороны с применением выражения (2.23), а с другой стороны - выражений (2.32) и (2.33). При <90° расхождения в значениях функций не превышает 0,1%, что вполне обеспечивает требуемую точность вычислений.
Координаты любой другой точки E автомобиля (рис. 2.4), находящейся от точки B на расстояниях a и b, соответственно по продольной и поперечной оси автомобиля, можно определить следующим образом:
Рассмотрим, каким образом происходит процесс поворота в имитационной модели в режиме свободного движения. До начала криволинейного движения водитель уменьшает скорость движения до значения базовой скорости свободного движения v св на участке поворота. С такой скоростью он завершает поворот, а после поворота при необходимости опять увеличивает скорость движения. Значение скорости движения v св определяется на основе натурных наблюдений.
Модель процесса поворота представляет собой последовательность трех этапов (рис. 2.5):
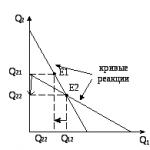
водитель с постоянной угловой скоростью р1 вращает рулевое колесо по/против направления часовой стрелки, при правом/левом повороте. Управляемые колеса совершают поворот с угловой скоростью k1 . Автомобиль совершает криволинейное движение. Радиус кривизны траектории движения уменьшается от + до R п (участок E 1);
водитель держит рулевое колесо в неподвижном состоянии. Автомобиль двигается по круговой траектории с постоянным радиусом поворота R п относительно центра поворота С. Этот этап в процессе поворота может отсутствовать (участок E 2);
водитель вращает рулевое колесо в обратном направлении с постоянной угловой скоростью р2 . Управляемые колеса поворачиваются с угловой скоростью k2 . Автомобиль снова движется по криволинейной траектории. Радиус кривизны траектории движения увеличивается от R п до + (участок E 3).
Первая часть неравенства (2.38) объясняется стремлением водителя удержать автомобиль на своей полосе движения. При < S 0min водитель не в состоянии предотвратить выезд автомобиля за пределы своей полосы движения, если ускорение не изменять (если ускорение изменится, то S 0min тоже изменится).
Рис. 2.5 Схема к описанию модели процесса поворота автомобиля
Вторая часть неравенства объясняется тем, что, если в начале поворота > S 0max , и в дальнейшем водитель не изменит параметры движения автомобиля (k и a), то автомобиль либо выедет за пределы проезжей части дороги, либо пересечет биссектрису OC угла ц под острым углом, т.е. в дальнейшем опять-таки выедет за пределы полосы движения. Поэтому, для предотвращения этого, водитель вынужден приближаться к повороту до тех пор, пока не выполнится второе условие неравенства (2.38) и только после этого начинать поворот.
Водитель начинает поворот на некотором расстоянии до центра O перекрестка. является случайной величиной. При принятых выше ограничениях значение величины находится в пределах:
S 0min < < S 0max (2.38)
Угловая скорость поворота управляемых колес k , которая определяется как отношение угловой скорости поворота рулевого колеса р на передаточное число рулевого механизма, рассматривается как случайная величина и определяется следующим образом:
определяется минимальное значение kmin угловой скорости поворота управляемых колес, при котором автомобиль в процессе поворота не выедет за пределы полосы движения с противоположной стороны от центра поворота С (рис. 2.6а);
определяется максимальное значение kmax угловой скорости поворота управляемых колес, при котором автомобиль в процессе поворота не выедет за пределы полосы движения со стороны центра поворота (рис. 2.6б);
определяются значения р min и р max угловой скорости поворота рулевого колеса, соответствующие значениям kmin и kmax ;
между значениями р min и р max генератором случайных чисел по заранее заданному закону распределения разыгрывается случайное число k ", которое и является значением угловой скорости поворота управляемых колес на первом этапе поворота.
Рис. 2.6 Схема к вычислению угловой скорости поворота управляемых колес автомобиля в процессе поворота
Закон распределения случайной величины k ", определяется в результате натурных наблюдений (см. п. 3.2, рис. 3.12). На третьем этапе значение угловой скорости поворота управляемых колес k "" определяется аналогично.